Esp32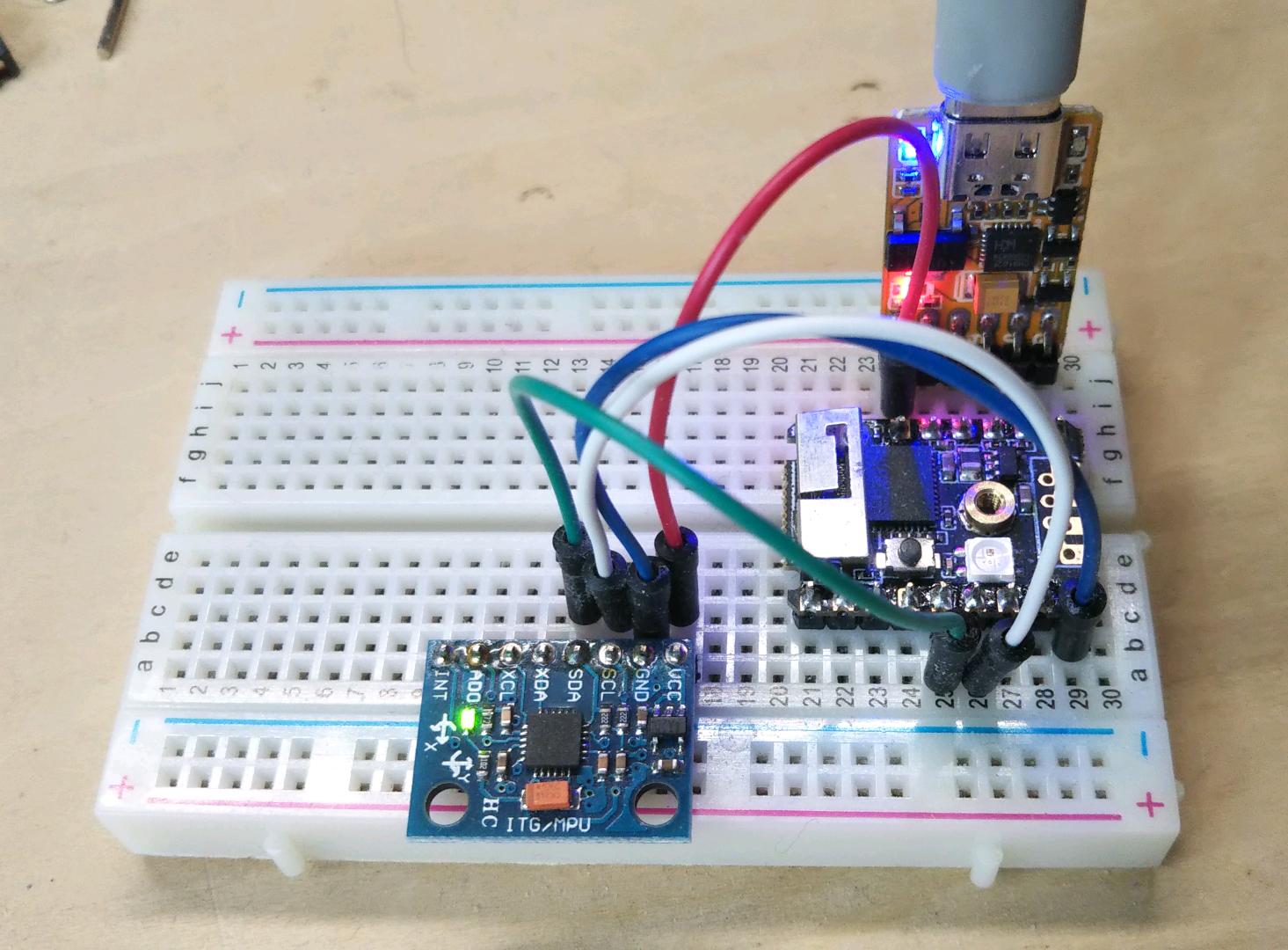

 comments powered by Disqus
comments powered by Disqus
M5stamp pico I2C確認…6軸センサー
6軸センサーを使ってM5stamp picoの機能確認
M5stamp picoの機能確認です。よく使うI2Cですが、手持ちで空いてるセンサーが6軸センサーのMPU6050です。 センサー値が出力されればOKとしましょう。
確認準備
配線
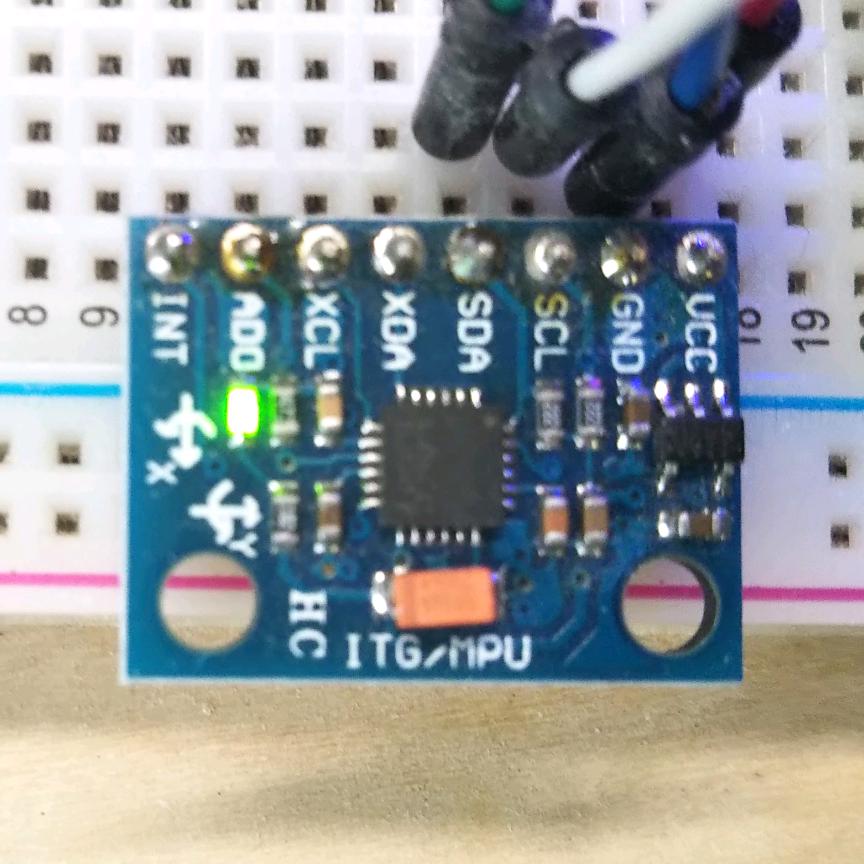
ブレッドボードを使って配線します。MPU6050の電源は、3.3V駆動です。あとは、GNDとI2Cの2線の計4線を接続すれば完了です。
MPU6050には空き端子ありますが、オープンで問題ありません。
ソフトウェア
Arduinoにて記述します。参考リンク1のサンプルコードをそのままコピーしました。そのままで問題ありません。開発環境は、VScode+Plathomeioです。
動作確認
ターミナルに数値が表示されていることを確認して、ArduinoIDEのシリアルプロッターで値をグラフにして可視化します。3軸の加速度とジャイロ情報がボードの動きに合わせて変化していることが確認できます。
まとめ
M5stamp picoの機能確認として、I2C接続した6軸センサーMPU6050の値を読み出しました。 リアルタイムにセンサー値を読み出せることを確認しました。
参考リンク