2年目のラズパイ日記…18日目…倒立振子始動

モーター系のお勉強ということで、倒立振子作ってみます。 https://ja.wikipedia.org/wiki/%E5%80%92%E7%AB%8B%E6%8C%AF%E5%AD%90
DCモーターを9軸センサーの2軸を使って制御します。 水曜日ポチッておいたのが届きました。

タミヤのダブルギヤセット(モーター2個付)や基板にタイヤ、 DCモーターの制御はTA7291Pで行います。

モーターの電源はエネループ(単3)×3がよろしいようです。エネループの単3は1本約1.2Vの出力です。モーター入力定格がMax3V、コントローラーの損失が約2Vあります。 エネループ1.2V×3→3.6Vでコントローラー損失が2Vということで、モーターは1.6V駆動となります。トルクが足りないときは、エネループ1本追加です。

先人の知恵としてこの辺のページが参考になります。 TA7921pの説明はこちら。 https://www.marutsu.co.jp/contents/shop/marutsu/mame/81.html 半日でつくる倒立振子というナイスな先人もいます。 https://www.instructables.com/id/%E5%8D%8A%E6%97%A5%E3%81%A7%E4%BD%9C%E3%82%8B%E5%80%92%E7%AB%8B%E6%8C%AF%E5%AD%90/
倒立振子の運動方程式とか状態方程式は、ググルとたくさん出てきます。 制御工学実装の基本のようで、いろいろな制御方法があります。
まずは、モーター単体を回転させるべく、配線等を行います。 ESP32からは、3本必要です。
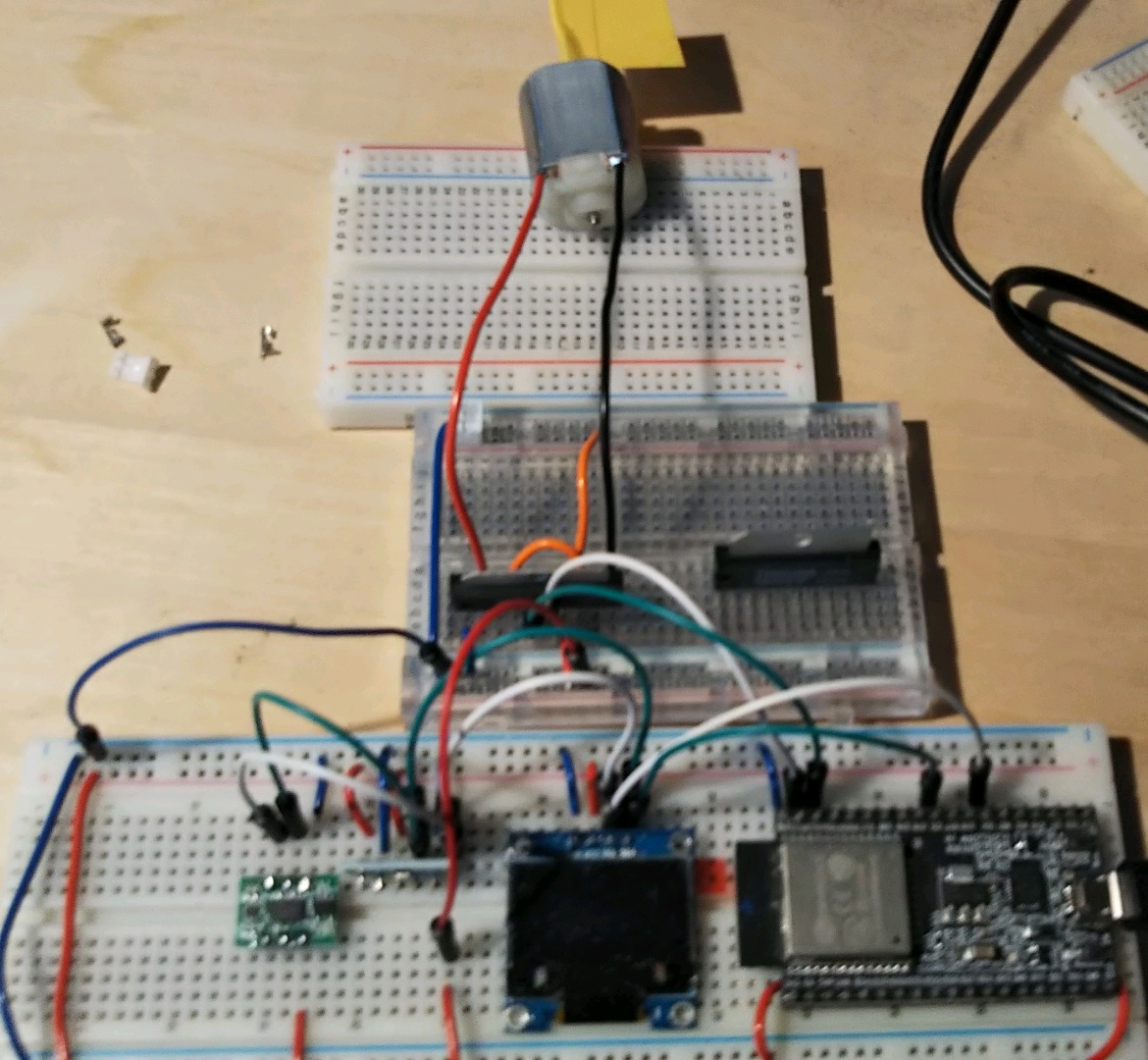
全体はこんな感じです。ESP32はもう1個買って専用にしないとだめですね。
DCモーターコントローラーは、こんな感じです。配線はまだ片側だけです。
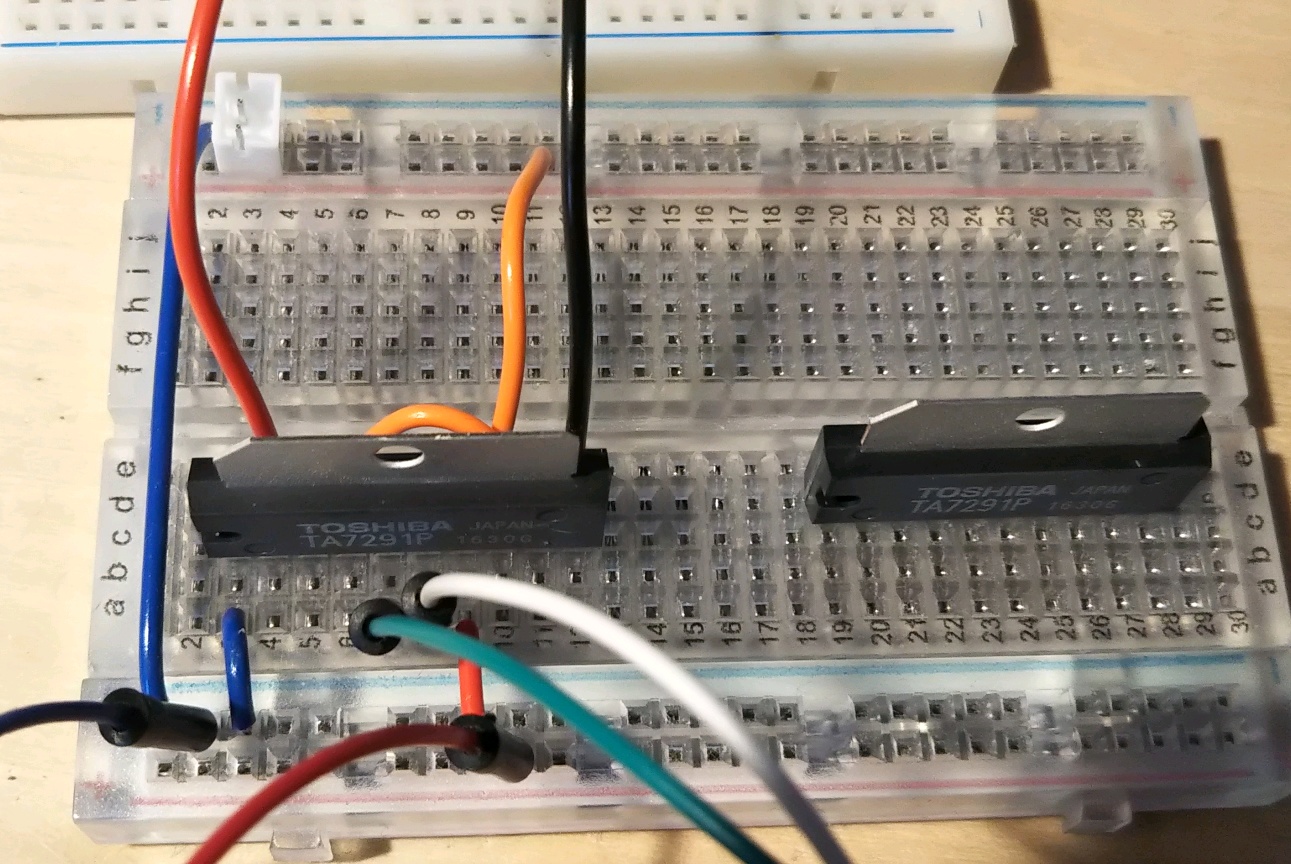
写真下側電源ラインにESP32からの5V(赤線)を、上側の電源ラインに電池からの線(オレンジ線)を接続して、電源を分離してます。GNDは共通です。
とりあえず勢いよくモーターが回ることを確認しました。 早すぎてわからないので、ギヤボックスを入れます。ギヤ比は114.7:1を選択しました。
正回転と逆回転を3回繰り返します。